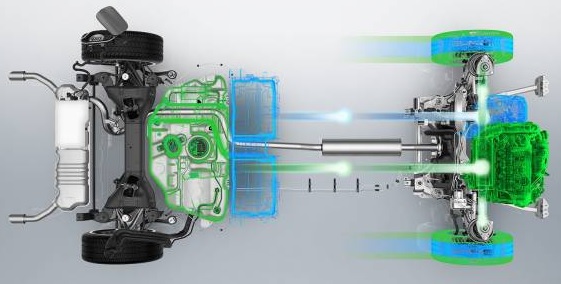
Reductor usado en vehículos híbridos.

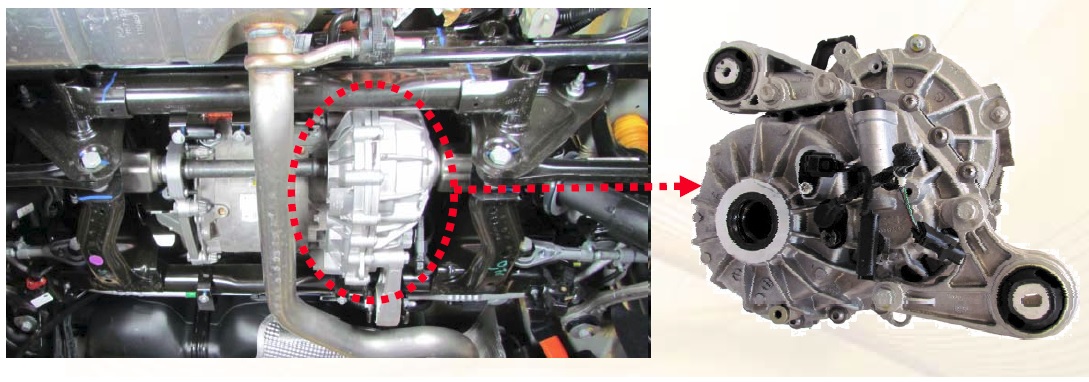
Implantación del reductor.
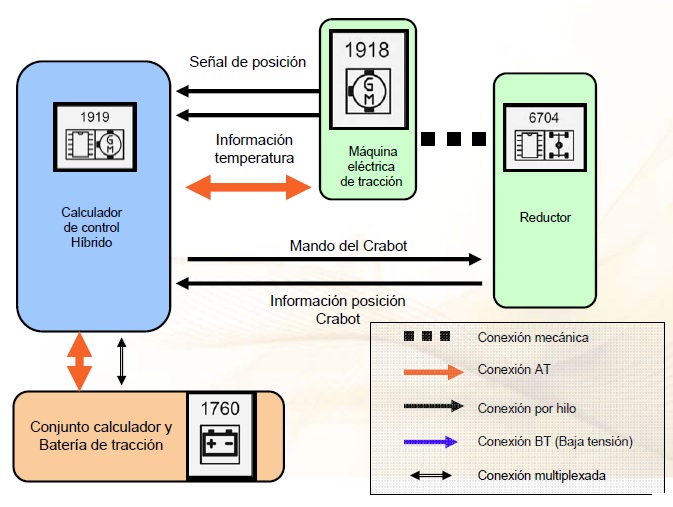
2. Entradas / Salidas
3. Composición de Reductor usado en vehículos híbridos.
El reductor está constituido por 2 elementos principales:
a) El diferencial.
b) Un Crabot controlado eléctricamente.
Composición general
a) 1 sola relación de desmultiplicación: 7,46
b) Idéntica relación marcha adelante y marcha atrás
c) Un Crabot controlado eléctricamente por el calculador de control Híbrido
d) Captador de posición del Crabot.
El reductor se presenta como una caja de cambios con un Crabot controlado eléctricamente que hace las veces de embrague.
La marcha atrás se obtiene gracias a la inversión del sentido de rotación de la máquina eléctrica de tracción.
El vehículo podría circular tan rápido en marcha atrás como en marcha adelante en modo ZEV, pero para evitar los riesgos de pérdida de control la velocidad se ha limitado a 30km/h (limitación la velocidad de rotación de la máquina eléctrica de tracción).
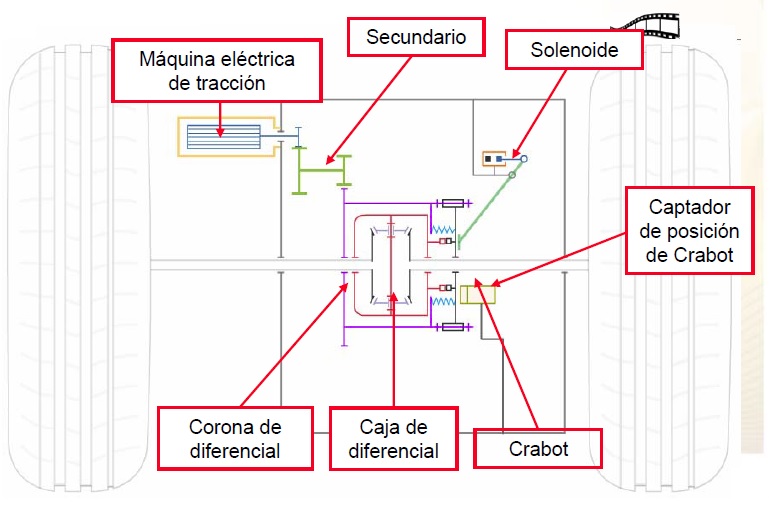
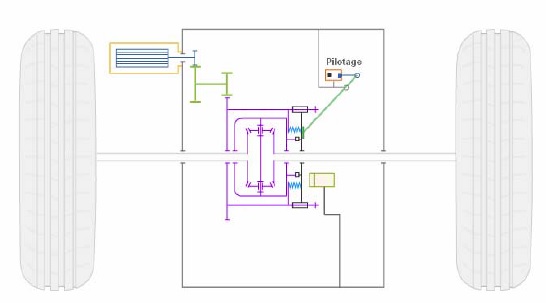
Esquema de principio:
Este esquema simplificado permite descubrir el conjunto de la composición del reductor.
En el reductor encontramos:
- La máquina eléctrica de tracción.
- Secundario.
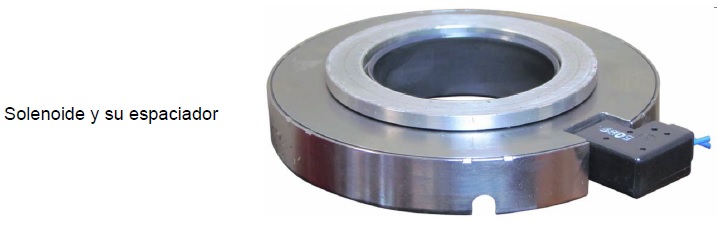
- El solenoide.
- La corona de diferencial.
- Caja de diferencial.
- El Crabot.
- Captador de posición de Crabot.
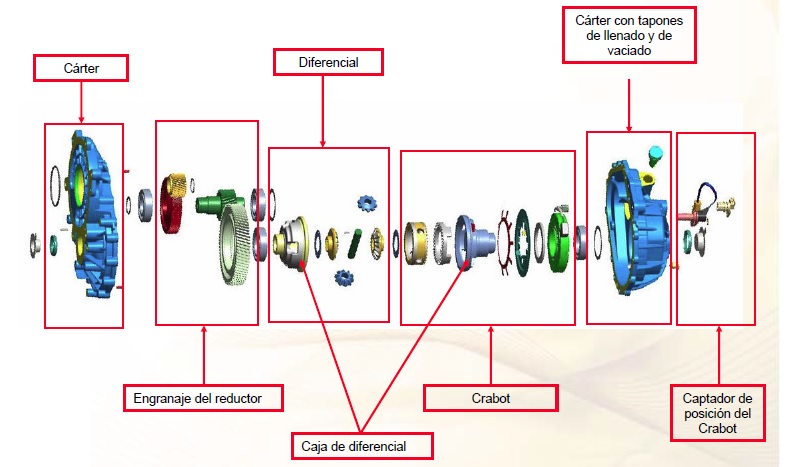
Engranajes del reductor:
- 1 piñón de ataque (máquina eléctrica de tracción) en amarillo.
- Un secundario (en rojo y verde).
- 1 corona de diferencial (en gris).
El diferencial:
a) 2 planetarios (en amarillo).
b) 2 satélites (en azul).
El Crabot eléctrico:
a) 1 Crabot (pieza gris y dorada).
b) 1 Resorte (pieza roja).
c) 1 Plataforma.
d) 1 Espaciador.
e) 1 Solenoide.
f) 1 Captador de posición de Crabot.
3.1. Consumo eléctrico:
- Corriente de entrada del solenoide: 4 A
- Intensidad de mantenimiento del solenoide: 1,2 A
El conjunto del reductor no está forzosamente sincronizado.
Para facilitar el acoplamiento, se hace que la máquina eléctrica de tracción ejecute movimientos de algunos grados hacia adelante y atrás. Lo que permite hacer oscilar el secundario y la corona de diferencial. Esta acción permite sincronizar la corona de diferencial con la caja de diferencial.
El acoplamiento se valida gracias al captador de posición de Crabot.
Una vez acoplado el conjunto, el diferencial está unido a la máquina eléctrica de tracción.
Si el conductor pone el selector de velocidades en posición neutra en circulación, el calculador de control Híbrido desacopla el reductor.
Desde las que las ruedas empiezan a girar, hay que sincronizar la velocidad de las ruedas con la de la máquina eléctrica de tracción para poder engranar con el Crabot sin daños.
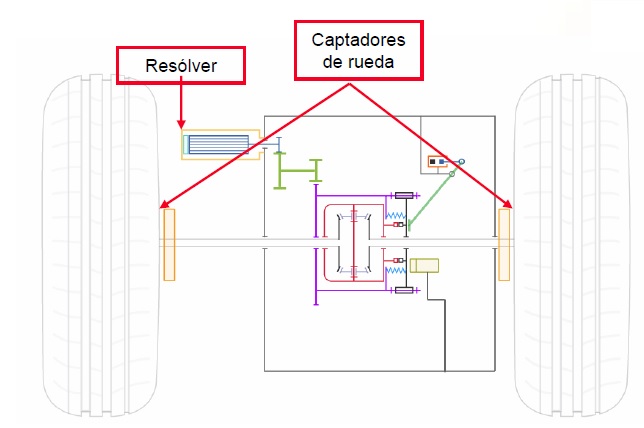
3.2. Las informaciones necesarias para funcionar son:
a) La velocidad de las ruedas, enviada por el calculador ESP.
b) La velocidad de la máquina eléctrica de tracción es enviada por el resólver.
Para sincronizar la velocidad de los elementos, el calculador de control Híbrido actúa sobre la velocidad de rotación de la máquina eléctrica de tracción.
La precisión del sistema permite conocer la velocidad con una exactitud de más o menos 10 rpm, lo que permite asegurar la sincronización.

Por encima de 120 km/h, el Crabot desacopla obligatoriamente el motor eléctrico de las ruedas traseras.
El límite de velocidad de rotación de la máquina eléctrica es de 7500 rpm. Se alcanza a 120 km/h.
Este captador de posición es de efecto Hall. Permite informar al calculador de control Híbrido de la posición del Crabot.