Servomotores en el automóvil.
1. Constitución y funcionamiento del servo.
Los Servomotores en el automóvil (también llamados servo) son cada vez mas utilizados, si bien en los últimos años se han empezado a sustituir por motores «paso a paso». Son un dispositivo que incluye un motor de corriente continua, cuyo eje tiene la capacidad de girar a cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición.
El motor de un servo, puede ser controlado tanto en velocidad como en posición.
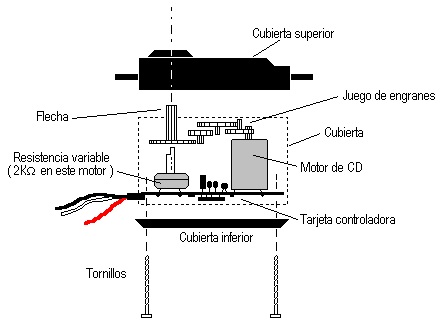
Está conformado por un motor, una caja reductora y un circuito electrónico de control. Un servo de automovil, «tiene un consumo de energía reducido».
El uso de esta clase de motor, se ha incrementado en los últimos años debido a que su precio y el coste de su control. a disminuido considerablemente
La corriente que requiere depende del tamaño del servo. Normalmente el fabricante indica cuál es la corriente que consume. La corriente depende principalmente del par, y puede exceder un amperio si el servo está enclavado (rotor del motor eléctrico bloqueado).
En otras palabras, un servomotor es un motor especial al que se ha añadido un sistema de control (tarjeta electrónica), un potenciómetro y un conjunto de engranajes. Con anterioridad los servomotores no permitían que el motor girara 360 grados, solo aproximadamente 180; sin embargo, hoy en día existen servomotores en los que puede ser controlada su posición y velocidad en los 360 grados. Los servomotores son comúnmente usados en modelismo como aviones, barcos, helicópteros y trenes para controlar de manera eficaz los sistemas motrices y los de dirección.
2. Aplicaciones en el automóvil.
En automoción los podemos encontrar entre otros lugares en:
- Sistema de orientación de espejos retrovisores exteriores. Los espejos se orientan hacia una posición previamente grabada en memoria de un calculador, al poner marcha atrás. El objeto es poder ver los bordillos de las aceras y de esta manera facilitar el aparcamiento. El espejo regresa a su posición de origen al quitar marcha atrás.
- Asientos regulables eléctricamente. Disponen de hasta cuatro servomotores para colocar la banqueta en las posiciones (generalmente tres) previamente guardadas en una UCE de asiento.
- Sistema de regulación de altura del haz luminoso. Por mediación de un servo, se permite orientar la inclinación del faro, regulando de esta manera la altura del haz. En este caso, esta regulación puede ser manual con un «potenciómetro», o automática, llevada a cabo por una UCE de control de faro.
- Control de trampillas en los conductos del bloque climatizador. La utilización de servos en este sistema, permite ajustar con precisión el ángulo de apertura de la trampilla. De esta manera, la mezcla de aire frio-caliente se adecua a las necesidades establecidas por la UCE del climatizador.
3. Conexiones eléctricas.
El servomotor tiene 3 terminales. Dos de alimentación («rojo (+)» y «negro (-)»), conectados a una tensión continua entre 5V y 7.5V, para uno genérico y 12V para uno de uso en el automóvil. El tercer terminal, se utiliza de control (amarillo o blanco). Se conecta a la UCE ó como en el ejemplo que propongo a continuación (servo de automóvil Opel Vectra B) a, un potenciometro.

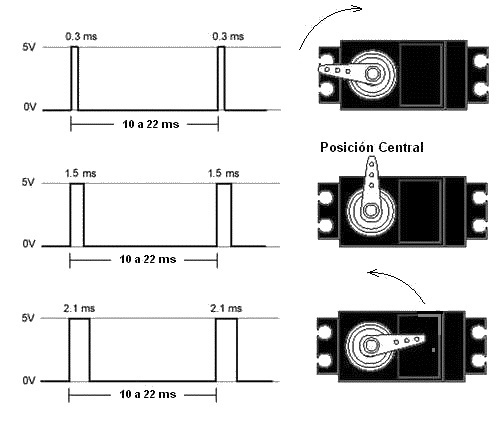
Los servomotores hacen uso de la modulación por ancho de pulsos (PWM) para controlar la dirección o posición de los motores de corriente continua. La mayoría trabaja en la frecuencia de los cincuenta hercios, así las señales PWM tendrán un periodo de veinte milisegundos. La electrónica dentro del servomotor responderá al ancho de la señal modulada. Si los circuitos dentro del servomotor reciben una señal a nivel alto de entre 0,5 a 1,4 milisegundos, éste se moverá en sentido horario; entre 1,6 a 2 milisegundos moverá el servomotor en sentido antihorario; 1,5 milisegundos representa un estado neutro para los servomotores estándares. A continuación se exponen ejemplos de cada caso:
Este ejemplo se puede apreciar perfectamente en el video adjunto.
4. El servo de regulación de inclinación del faro (regulación altura del haz de luz).
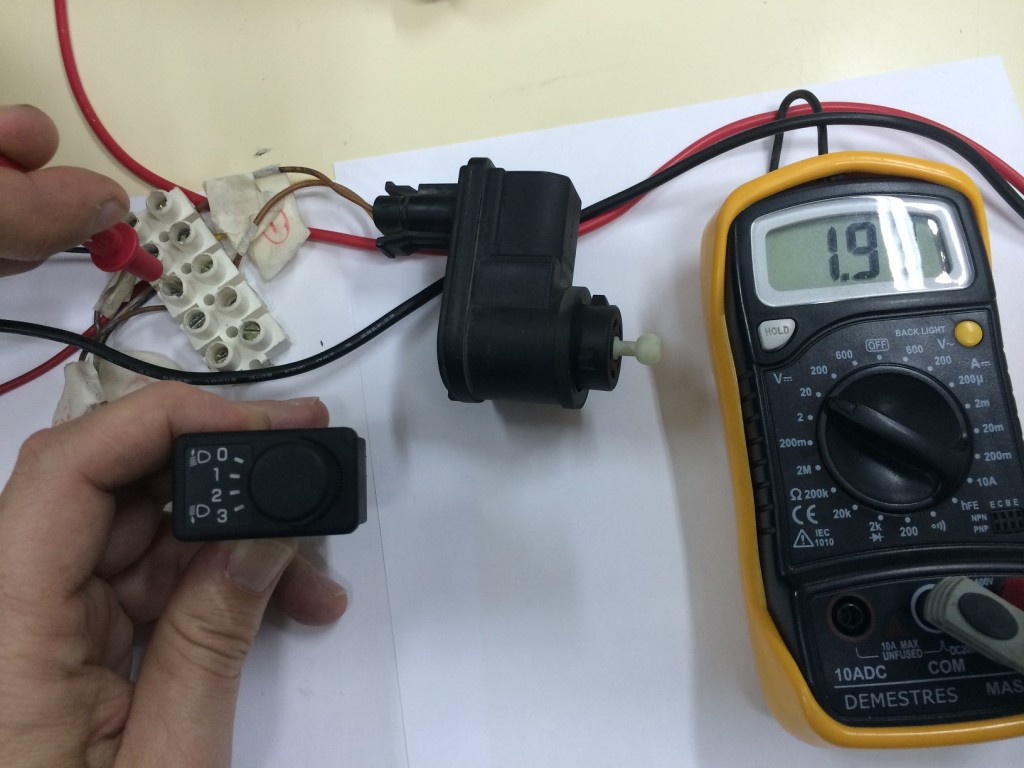
A modo de ejemplo, traemos en esta entrada un servo de faro perteneciente a Opel Vectra B. A diferencia de los vistos anteriormente, el control se realiza con una tensión continua (que no pulso PWM), procedente de un «potenciometro» (ver esquema eléctrico completo) que dispone de cuatro posiciones. De esta manera se simplifica bastante el control del servo, si bien el servo propiamente dicho es el mismo, es decir, dispone de uno motor de CC, una reductora y un potenciómetro de «copia». En este coso, el motor gira en una dirección u otra unos determinados grados dependiendo del valor de tensión (CC) que suministremos al terminal de control.

6. Comprobación, diagnóstico.
Una de las averías típicas de los servos es el desgaste del «potenciometro de copia» que llevan en el interior o penetración de suciedad. Esto provoca que la electrónica de control no sepa en que posición se encuentra el eje, y cuantos grados ha girado en uno u otro sentido. El efecto observado es que el servo no para de girar en ambas direcciones una serie de grados sin saber donde ubicarse y parar.
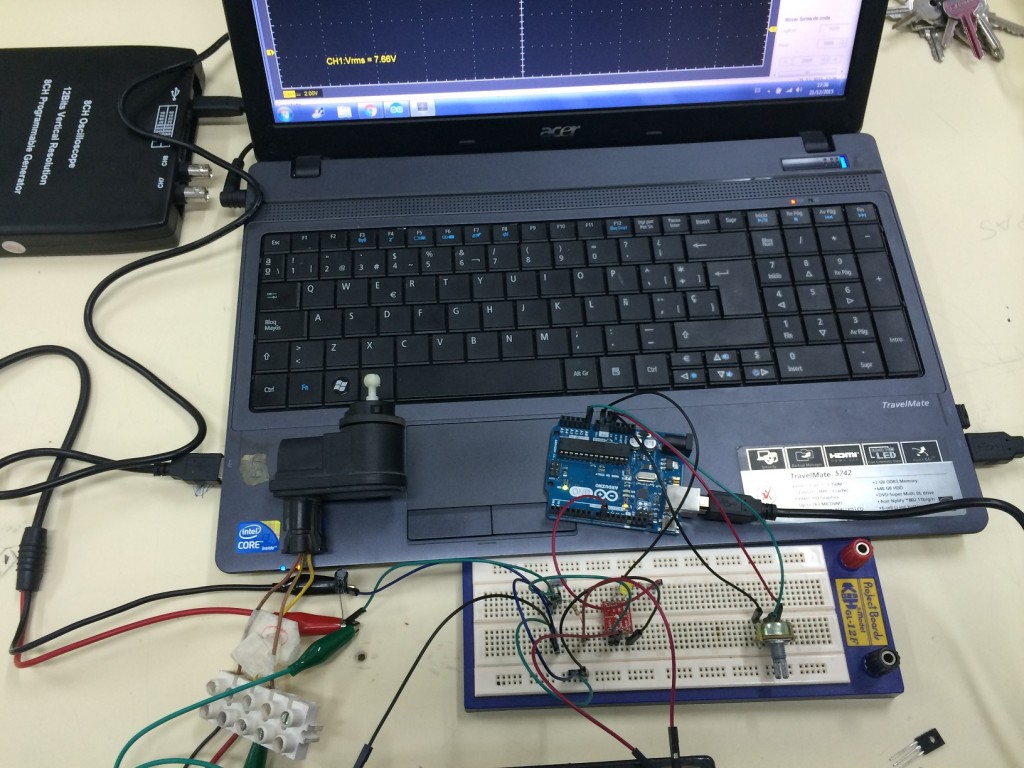
Para su diagnosis, hemos extraído el servo del faro (girándolo media vuelta), lo hemos alimentado a doce voltios, y hemos ido modificando la tensión de de control con una fuente de alimentación regulable ) (3V, 4,5V, 6V, 7,5V, 9V y 12 Voltios). Hemos podido observar que para cada una de las tensiones de control suministradas, el vástago de inclinación del faro adopta una posición determinada. (Ver video)
![]()

como saber si se malogro el servo motor de mi auto
Buen día, consulta, en caso e alimentarlo con una fuente de 12 volts y con otra alimentar el cable de control, se deben unir ambos negativos(-)?, agradezco su pronta repuesta. Muchas gracias
Efectivamente.
Un saludo.